Resource Article: http://en.wikipedia.org/wiki/Graph_theory#Subsumption_and_unification
In mathematics and computer science, graph theory is the study of graphs, which are mathematical structures used to model pairwise relations between objects. A "graph" in this context is made up of "vertices" or "nodes" and lines called edges that connect them. A graph may be undirected, meaning that there is no distinction between the two vertices associated with each edge, or its edges may be directed from one vertex to another; see graph (mathematics) for more detailed definitions and for other variations in the types of graph that are commonly considered. Graphs are one of the prime objects of study in discrete mathematics.
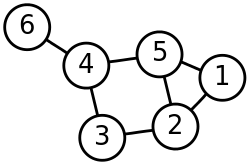
A drawing of a Graph. 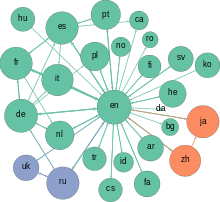
The network graph formed by Wikipedia editors (edges) contributing to different Wikipedia language versions (nodes) during one month in summer 2013. Graphs are represented visually by drawing a dot or circle for every vertex, and drawing an arc between two vertices if they are connected by an edge. If the graph is directed, the direction is indicated by drawing an arrow. A graph drawing should not be confused with the graph itself (the abstract, non-visual structure) as there are several ways to structure the graph drawing. All that matters is which vertices are connected to which others by how many edges and not the exact layout. In practice it is often difficult to decide if two drawings represent the same graph. Depending on the problem domain some layouts may be better suited and easier to understand than others. The pioneering work of W. T. Tutte was very influential in the subject of graph drawing. Among other achievements, he introduced the use of linear algebraic methods to obtain graph drawings. Graph drawing also can be said to encompass problems that deal with the crossing number and its various generalizations. The crossing number of a graph is the minimum number of intersections between edges that a drawing of the graph in the plane must contain. For a planar graph, the crossing number is zero by definition. Drawings on surfaces other than the plane are also studied. | In the most common sense of the term, a graph is an ordered pair G = (V, E) comprising a set V of vertices or nodes together with a set E of edges or lines, which are 2-element subsets of V (i.e., an edge is related with two vertices, and the relation is represented as an unordered pair of the vertices with respect to the particular edge). To avoid ambiguity, this type of graph may be described precisely as undirected and simple. Other senses of graph stem from different conceptions of the edge set. In one more generalized notion, E is a set together with a relation of incidence that associates with each edge two vertices. In another generalized notion, E is a multiset of unordered pairs of (not necessarily distinct) vertices. Many authors call this type of object a multigraph or pseudograph. All of these variants and others are described more fully below. The vertices belonging to an edge are called the ends, endpoints, or end vertices of the edge. A vertex may exist in a graph and not belong to an edge. V and E are usually taken to be finite, and many of the well-known results are not true (or are rather different) for infinite graphs because many of the arguments fail in the infinite case. The order of a graph is (the number of vertices). A graph's size is , the number of edges. The degree of a vertex is the number of edges that connect to it, where an edge that connects to the vertex at both ends (a loop) is counted twice. For an edge {u, v}, graph theorists usually use the somewhat shorter notation uv. There are different ways to store graphs in a computer system. The data structure used depends on both the graph structure and the algorithm used for manipulating the graph. Theoretically one can distinguish between list and matrix structures but in concrete applications the best structure is often a combination of both. List structures are often preferred for sparse graphs as they have smaller memory requirements. Matrix structures on the other hand provide faster access for some applications but can consume huge amounts of memory. However, there often times can be Graph Problematics in Graph Theory. |
List structures include the incidence list, an array of pairs of vertices, and the adjacency list, which separately lists the neighbors of each vertex: Much like the incidence list, each vertex has a list of which vertices it is adjacent to.
Matrix structures include the incidence matrix, a matrix of 0's and 1's whose rows represent vertices and whose columns represent edges, and the adjacency matrix, in which both the rows and columns are indexed by vertices. In both cases a 1 indicates two adjacent objects and a 0 indicates two non-adjacent objects. The Laplacian matrix is a modified form of the adjacency matrix that incorporates information about the degrees of the vertices, and is useful in some calculations such as Kirchhoff's theorem on the number of spanning trees of a graph. The distance matrix, like the adjacency matrix, has both its rows and columns indexed by vertices, but rather than containing a 0 or a 1 in each cell it contains the length of a shortest path between two vertices.
Matrix structures include the incidence matrix, a matrix of 0's and 1's whose rows represent vertices and whose columns represent edges, and the adjacency matrix, in which both the rows and columns are indexed by vertices. In both cases a 1 indicates two adjacent objects and a 0 indicates two non-adjacent objects. The Laplacian matrix is a modified form of the adjacency matrix that incorporates information about the degrees of the vertices, and is useful in some calculations such as Kirchhoff's theorem on the number of spanning trees of a graph. The distance matrix, like the adjacency matrix, has both its rows and columns indexed by vertices, but rather than containing a 0 or a 1 in each cell it contains the length of a shortest path between two vertices.
There is a large literature on graphical enumeration: the problem of counting graphs meeting specified conditions. Some of this work is found in Harary and Palmer (1973).
 RSS Feed
RSS Feed